Jugnoo and Jassi
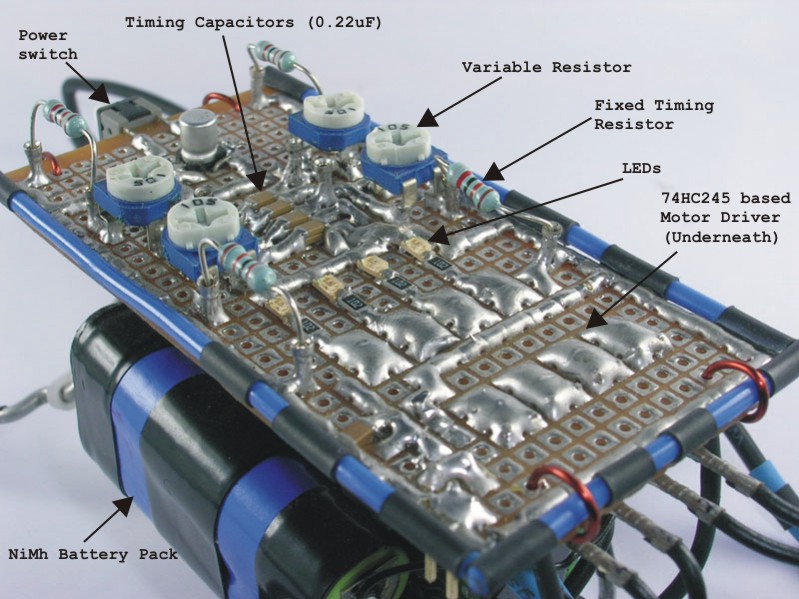
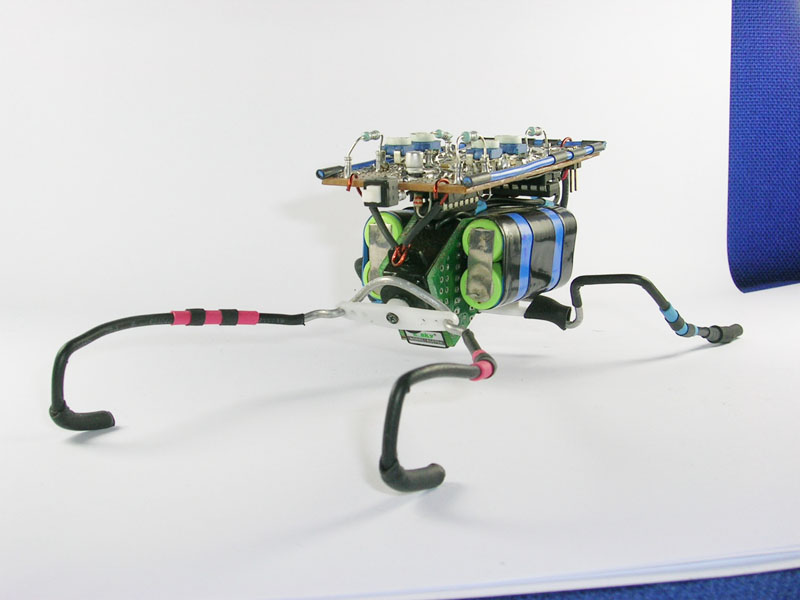
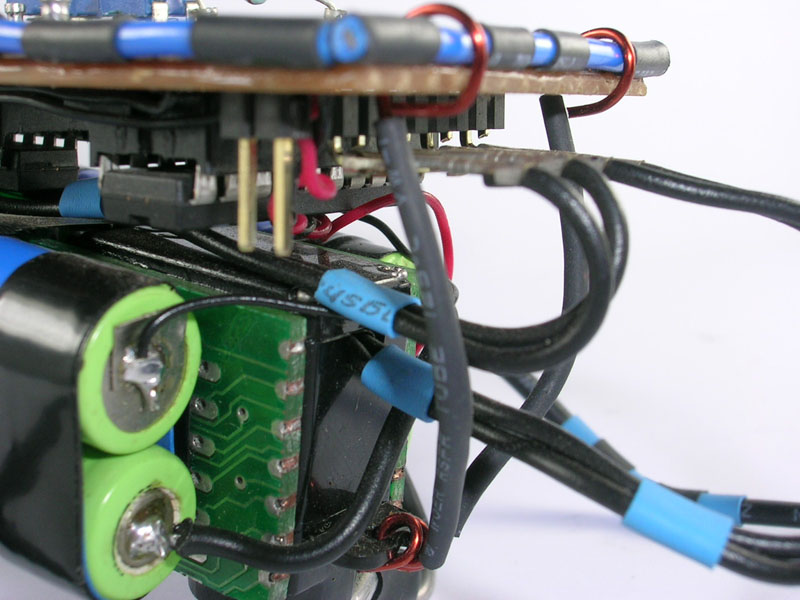
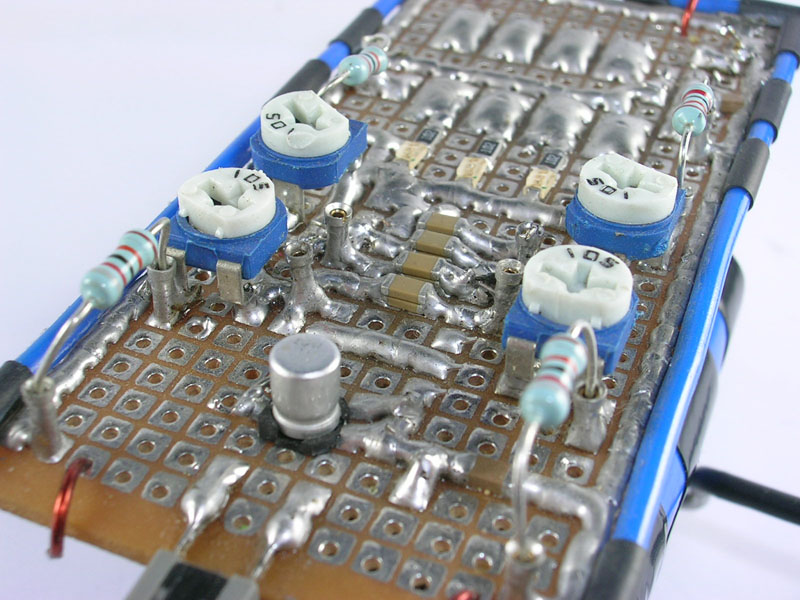
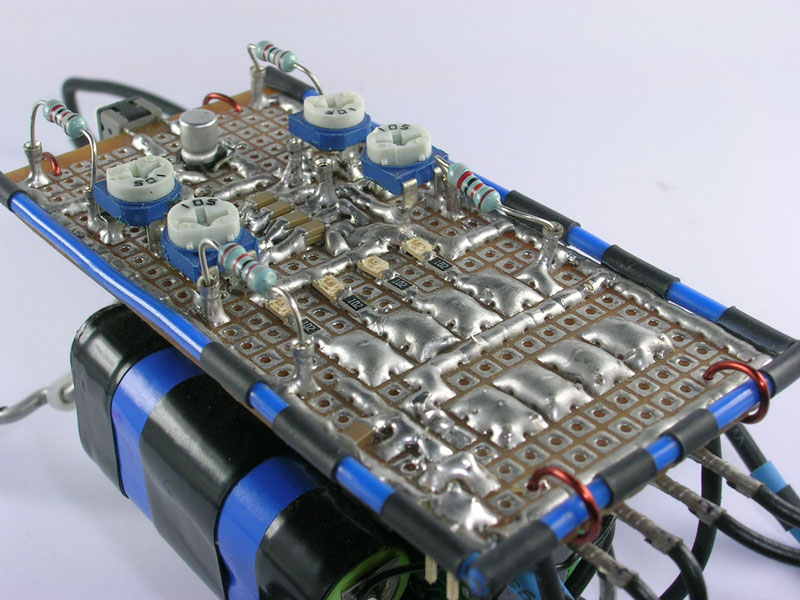
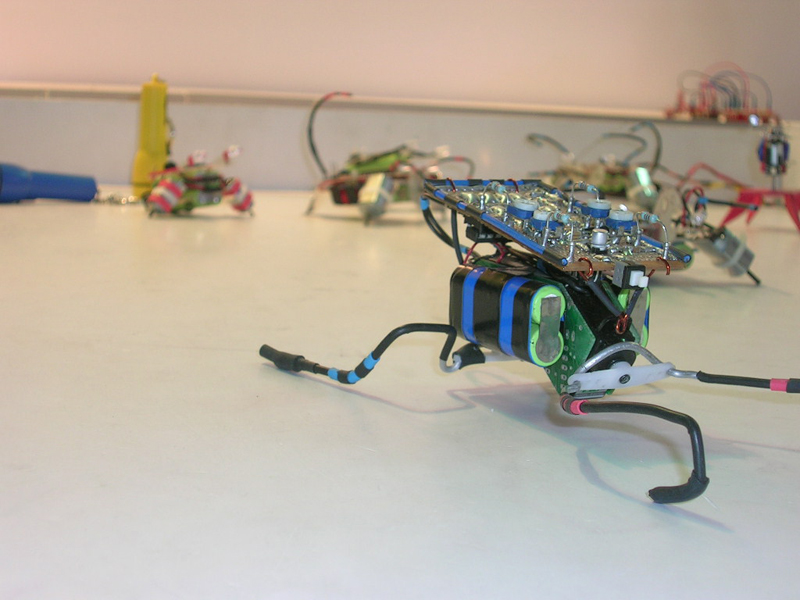
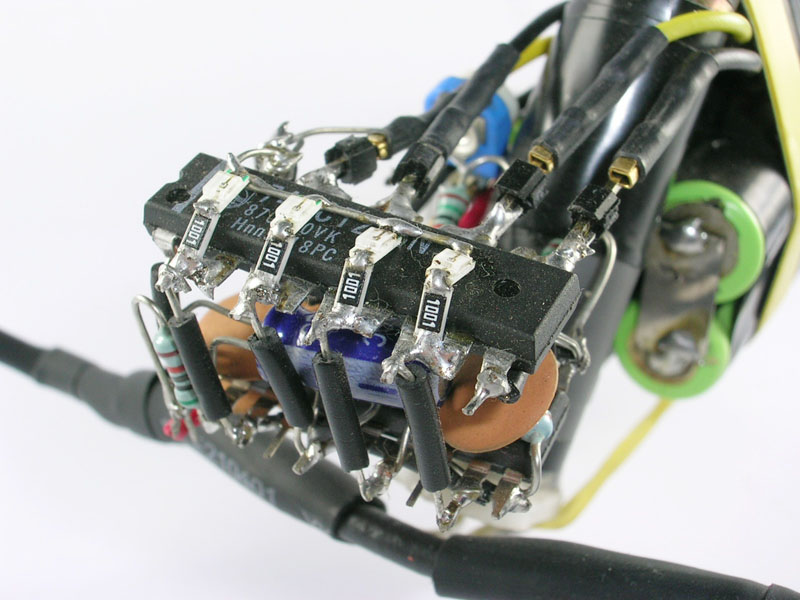
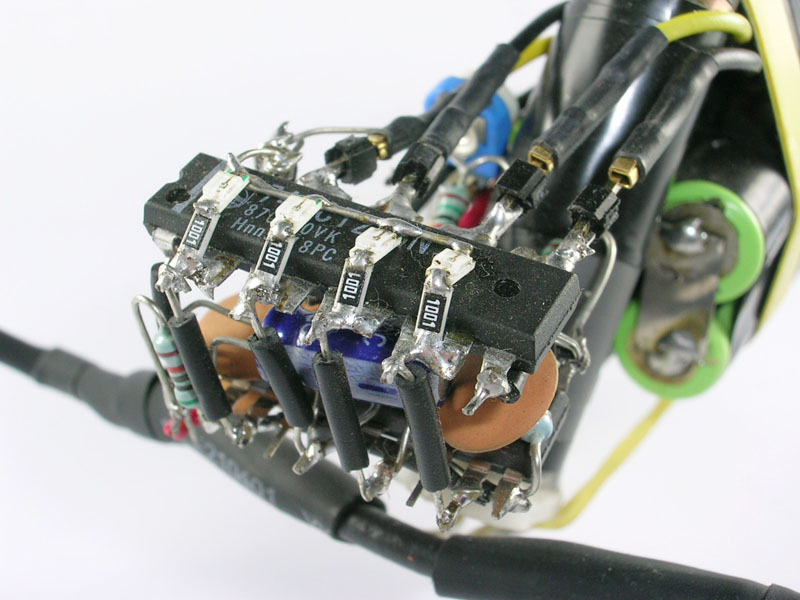
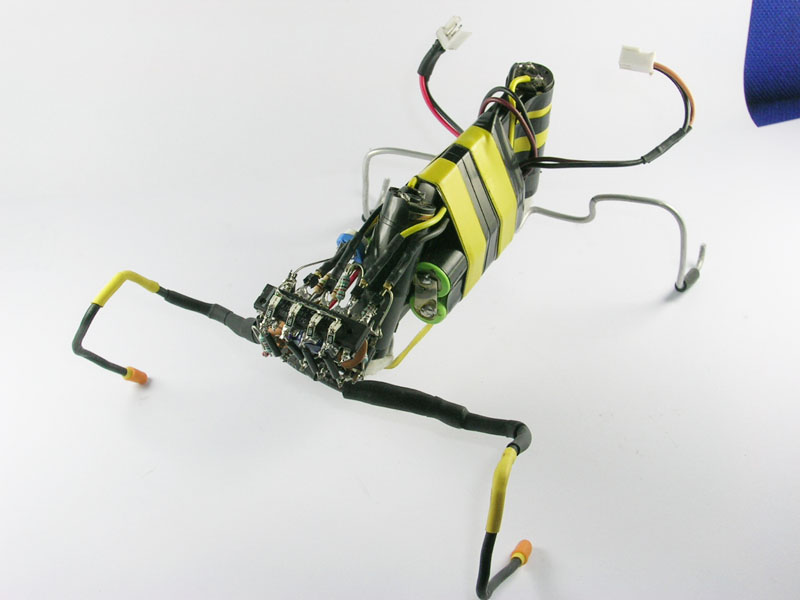
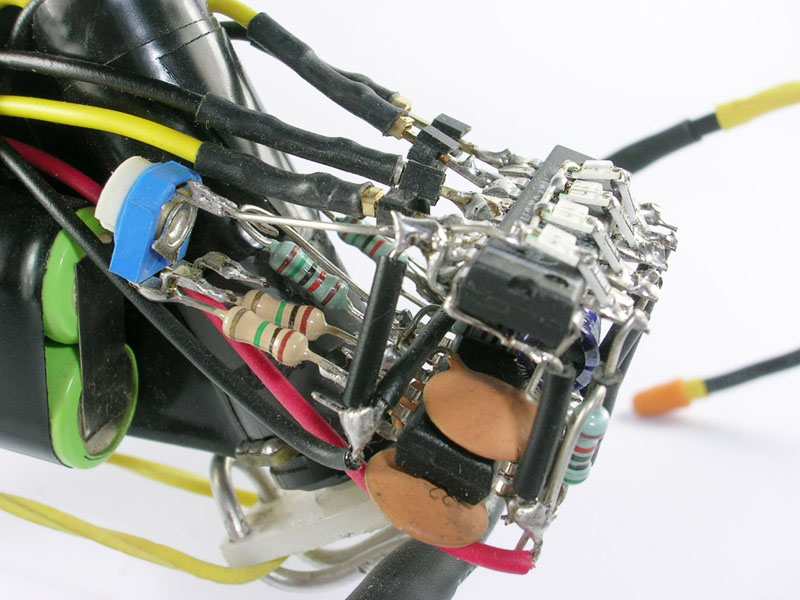
Jugnoo is a 2 motor, microcore based walking robot. The circuit is nicely described on Eric Seale’s website. Jugnoo uses two hacked micro RC servo motors for actuation and is powered by a set of 4 AAA NiMh batteries. As in most of my BEAM projects, I spend more time figuring out the geometry and the component placements than on actual assembly. This was the first time I tried to use the inverted pcb assembly technique, where the solder side of the pcb is made visible. The technique is very popular among the BEAM builders community and is successfully used by Solarbotics. A perfect example would be Mark Tiden’s robots.
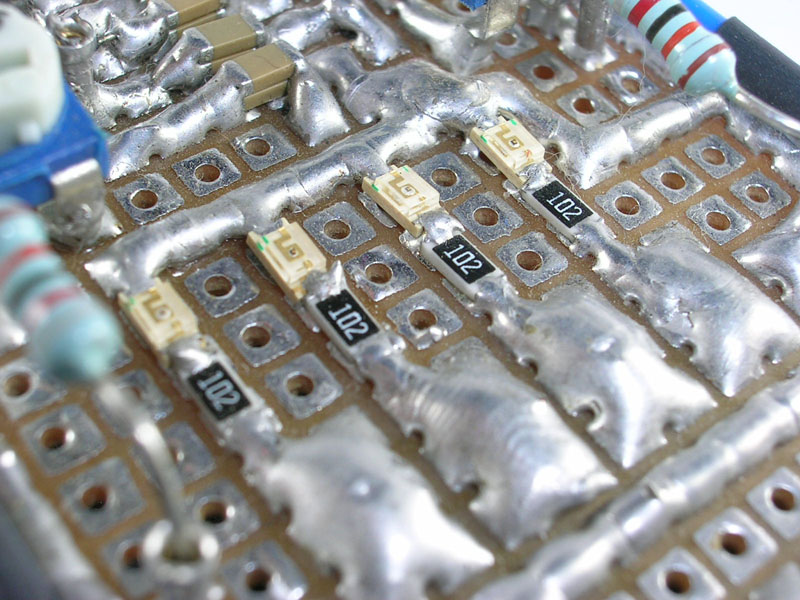
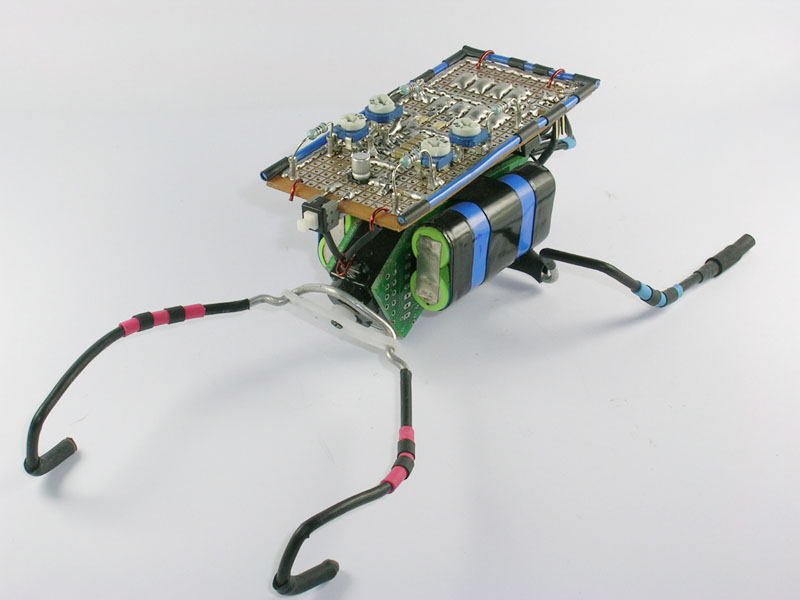
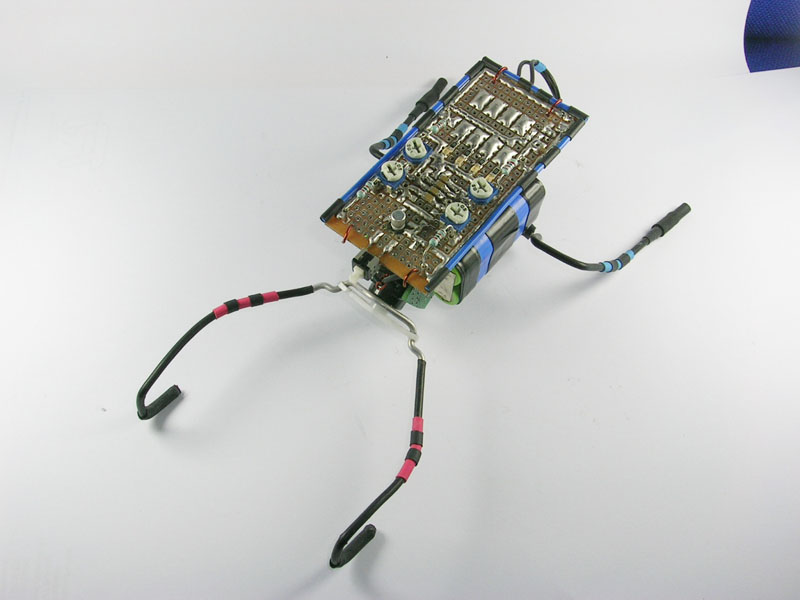
A lot of SMD components were used to keep the look as compact/flat as possible. It was real fun soldering them on the veroboard. The legs are bent out of heavy gauge aluminum wires. (They are popularly used as clothes line here in India) Thick rubber tubes were used at the tip of the legs to improve traction.
Unfortunately, the batteries turned out to be of poor quality. After the first few recharges, they simply died. Now Jugnoo has to be powered externally. I am planning to replace the current batteries with Li Ions in the immediate future.

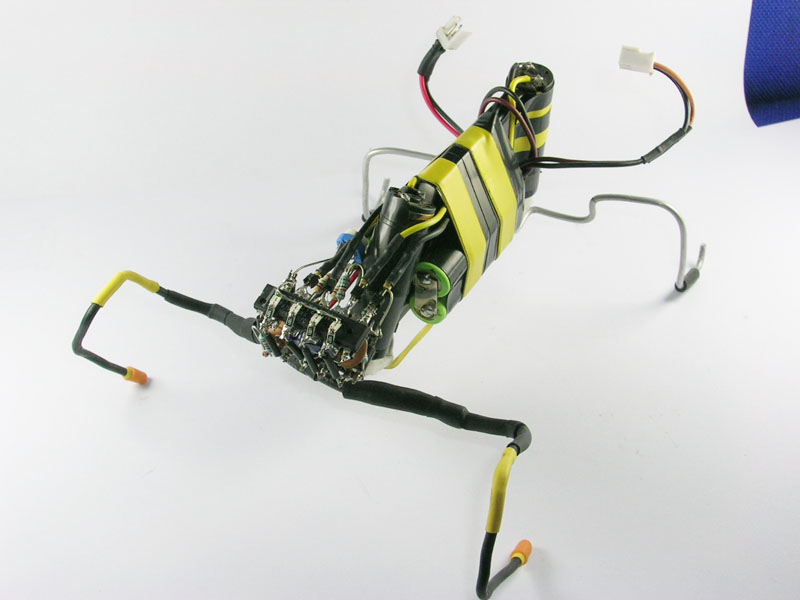
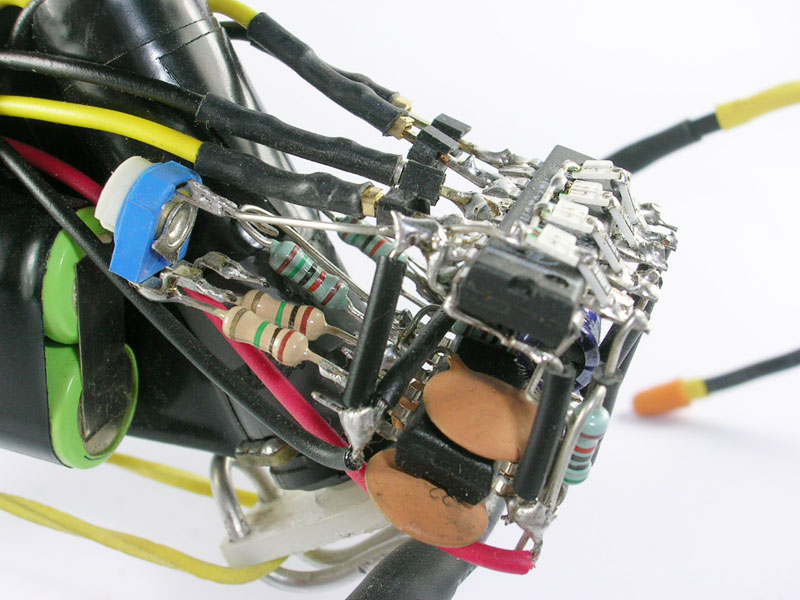
Jassi is a 2 motor, Bicore based walking robot. She is more of a slider than a walker. Her name is inspired from an ex-popular Indian sitcom. She is ugly yet able.
Jassi’s ugly looks are an perfect example of how sometimes good planning can indeed go wrong. A good learning experience. And thats how her better looking cousin Jugnoo was born. But I am proud of both.
Freeforming the complete circuit didn’t turn out to be very difficult.